






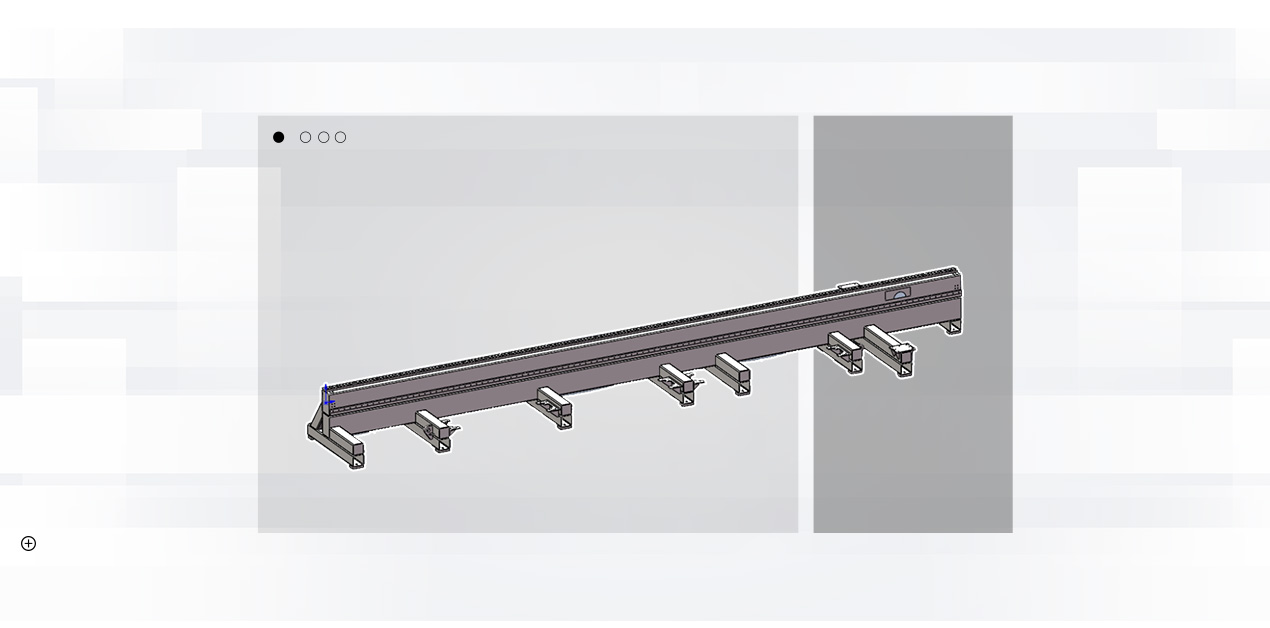
Cama de estrutura suspensa lateral, peça única soldada
A base da máquina adota uma estrutura suspensa lateralmente e é soldada em peça única, sendo recozida para eliminar tensões internas. Após o desbaste, é realizado um envelhecimento por vibração antes do acabamento, melhorando significativamente a rigidez e a estabilidade da máquina-ferramenta e garantindo sua precisão. O acionamento do servomotor CA é controlado por um sistema de controle numérico, e o mandril realiza movimento alternativo no eixo Y após o acionamento do motor, permitindo movimentos rápidos e eficientes de avanço. Tanto a cremalheira do eixo Y quanto a guia linear são fabricadas com componentes de alta precisão, garantindo a exatidão da transmissão. Os interruptores de limite em ambas as extremidades do curso controlam o movimento, e um dispositivo de limite rígido é instalado simultaneamente, assegurando a segurança da movimentação da máquina-ferramenta. A máquina-ferramenta está equipada com um dispositivo de lubrificação automática que adiciona óleo lubrificante às partes móveis da base em intervalos regulares para garantir o bom funcionamento dessas partes, prolongando a vida útil das guias, engrenagens e cremalheiras.
Dispositivo de alimentação frontal
O dispositivo de alimentação frontal inclui uma placa de suporte controlada por um cilindro pneumático, que sustenta o tubo quando este é comprido e evita que ele ceda.
Durante o corte da peça, o cilindro de suporte elevado sustenta a placa de apoio, impedindo que o tubo ceda. Ao término do corte, todos os cilindros de suporte elevados são retraídos, e a peça cai sobre a placa de corte, deslizando até o local de armazenamento. O acionamento dos cilindros é controlado automaticamente pelo sistema.
A seção frontal também é dividida em tipo de acompanhamento e tipo de ajuste manual.

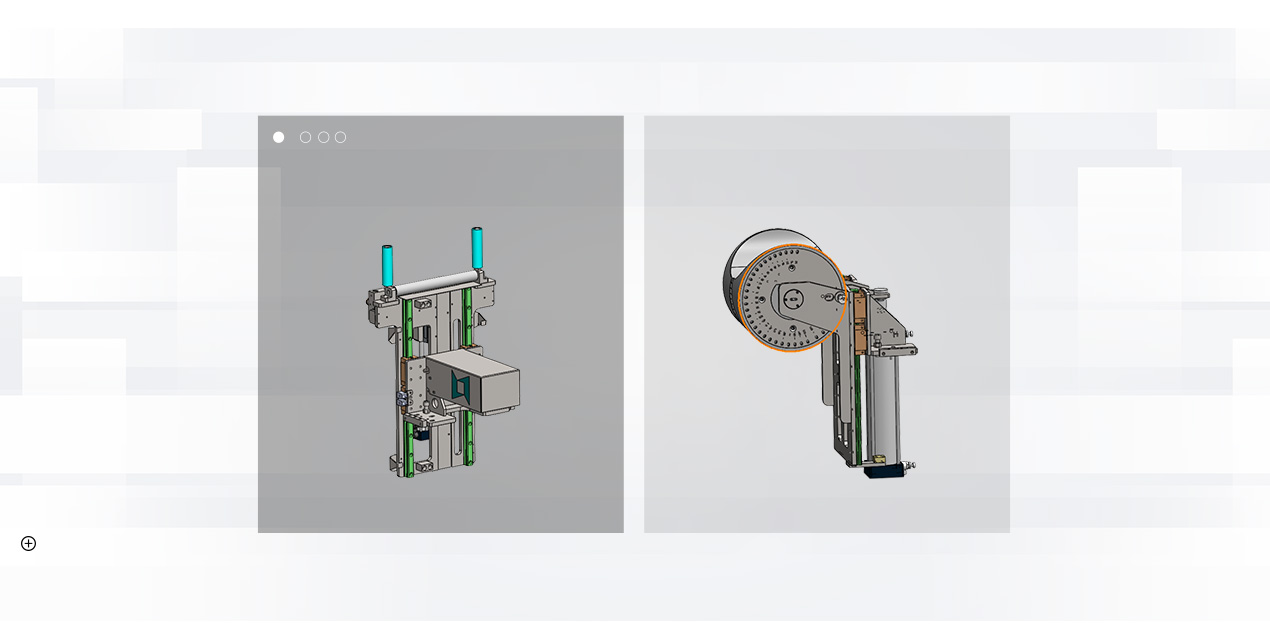
Mecanismos de suporte
Existem 3 conjuntos de mecanismos de suporte instalados na cama, e dois tipos estão disponíveis:
1. O suporte auxiliar é controlado por um servomotor independente para se mover para cima e para baixo, principalmente para compensar a deformação excessiva de tubos longos cortados (tubos com diâmetros pequenos). Quando a placa traseira se move para a posição correspondente, o suporte auxiliar pode ser abaixado para evitar esse problema.
2. O suporte de roda de diâmetro variável é levantado e abaixado pelo cilindro, podendo ser ajustado manualmente para diferentes posições de escala para suportar tubos de diferentes tamanhos.
Peça de mandril
A placa de fixação é dividida em duas placas pneumáticas de curso total, uma frontal e outra traseira, ambas com movimento na direção Y. A placa traseira é responsável por fixar e alimentar o tubo, enquanto a placa frontal é instalada na extremidade da mesa para fixar os materiais. As placas frontal e traseira são acionadas por servomotores para garantir a rotação síncrona.
Com a fixação conjunta de mandris duplos, é possível realizar o corte de extremidades curtas, que podem atingir de 20 a 40 mm, além de suportar o corte de extremidades mais longas.
A máquina de corte de tubos da série TN adota o método de movimento e prevenção de travamento do mandril, o que permite o corte com dois mandris simultaneamente, evitando que o tubo fique muito comprido, instável e com precisão insuficiente.

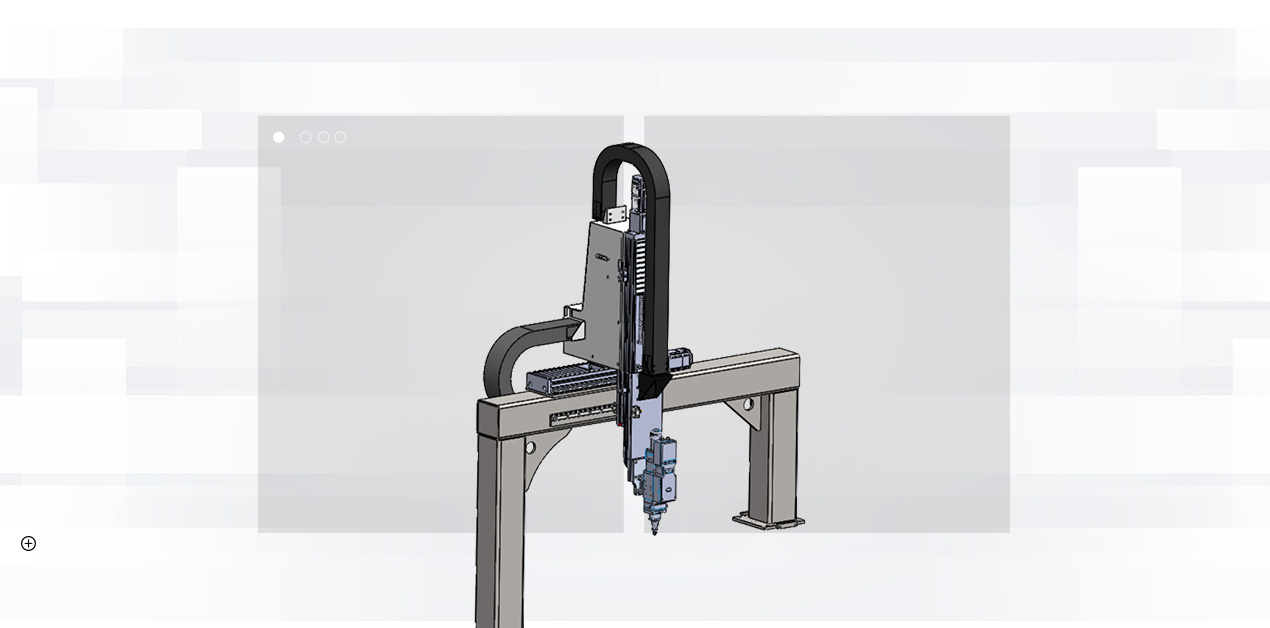
Dispositivo de eixo
A travessa do dispositivo do eixo X adota uma estrutura de pórtico, soldada por uma combinação de tubo quadrado e chapa de aço. O componente do pórtico é fixado na mesa, e o eixo X é acionado por um servomotor que movimenta a cremalheira e o pinhão para realizar o movimento alternativo da placa deslizante na direção X. Durante o movimento, o interruptor de limite controla o curso para limitar a posição e garantir a segurança da operação do sistema.
Ao mesmo tempo, o eixo X/Z possui sua própria cobertura para proteger a estrutura interna e proporcionar melhor proteção e remoção de poeira.
O dispositivo do eixo Z realiza principalmente o movimento ascendente e descendente da cabeça do laser.
O eixo Z pode ser usado como um eixo CNC para realizar seu próprio movimento de interpolação e, ao mesmo tempo, pode ser vinculado aos eixos X e Y, podendo também ser alternado para controle de seguimento para atender às necessidades de diferentes situações.
Vantagens da Máquina de Corte a Laser de Fibra para Tubos Metálicos 62TN

-

Máquina de corte a laser de fibra TX124 2024 para alumínio...
-
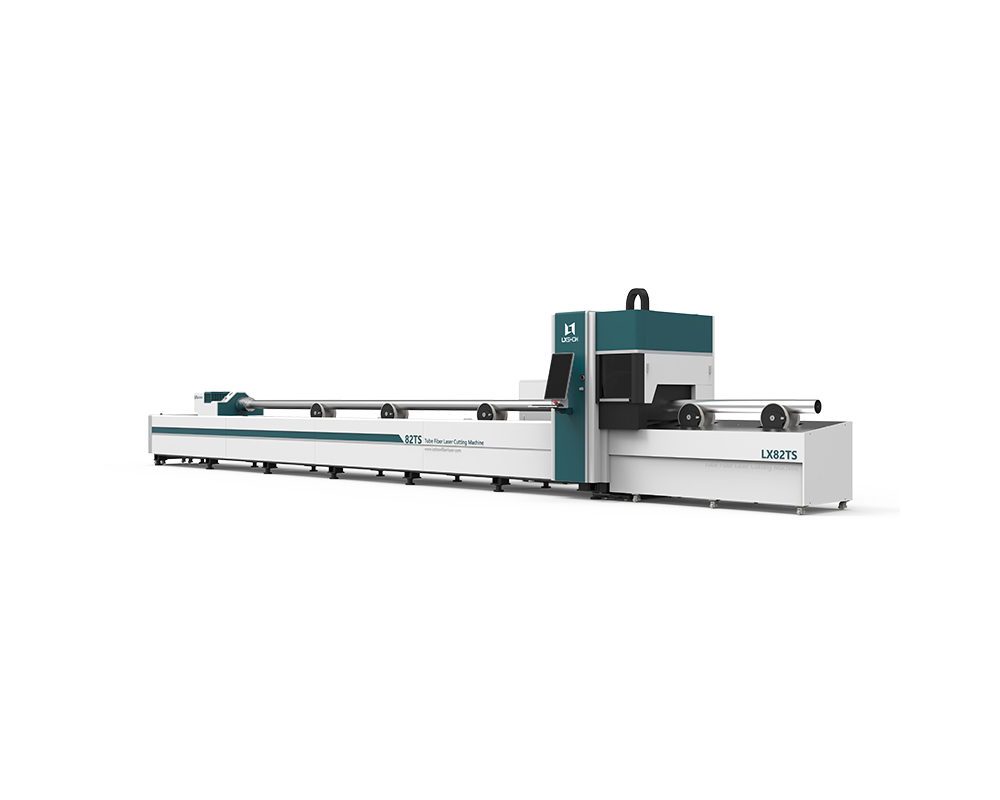
LX82TS 7% de desconto 1kw 1,5kw 3kw 4kw 6kw Fibra ...
-

LX123TX Melhor Laser de Fibra de Alta Resistência com Três Mandris...
-

Cortadora a laser de fibra para chapas metálicas LX3015E com excelente...
-

Laser de fibra para metal com alimentação semiautomática LX62TN...
-

Máquina de corte de tubos econômica LX62TD 1-6KW P...











